Ego-Vehicle Speed Prediction Using a Long Short-Term Memory Based Recurrent Neural Network
Published in International Journal of Automotive Technology, 2019
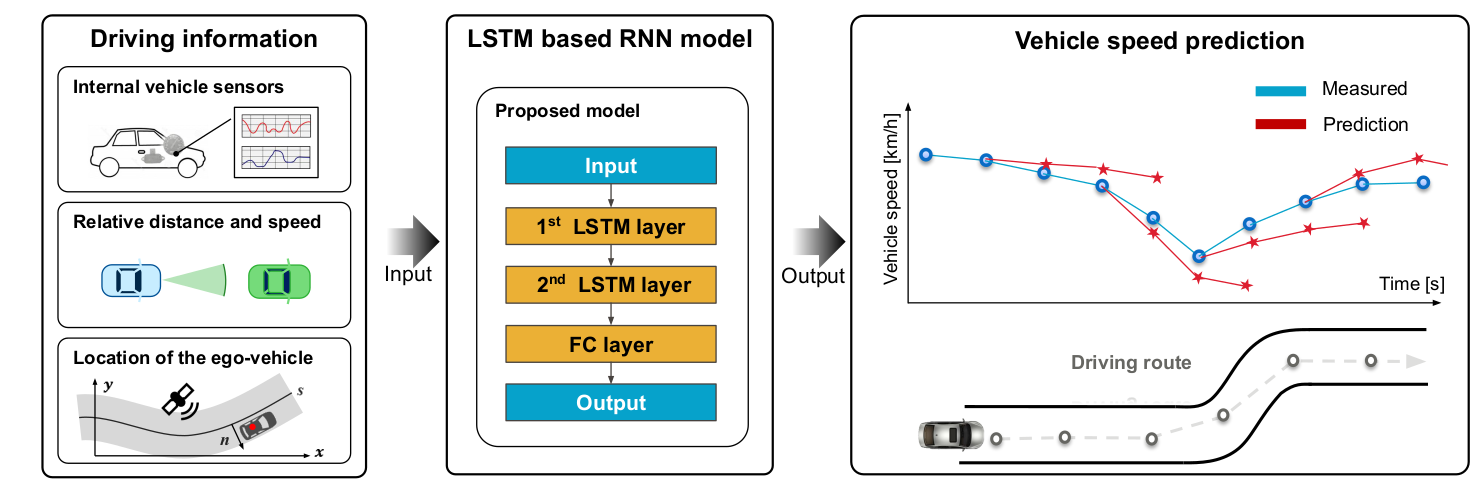
This study proposes an LSTM-based Recurrent Neural Network (RNN) model to predict ego-vehicle speed with high accuracy, addressing the challenges of various driving conditions. Using inputs like internal vehicle data, radar sensor data, and GPS-based location information, the model predicts speed for a 15-second horizon based on the past 30 seconds of data.
Background
Accurate vehicle speed prediction is vital for optimizing powertrain control and improving fuel efficiency. Traditional models struggle with complex, dynamic conditions, while neural networks, especially LSTM-based RNNs, excel by capturing nonlinear patterns and long-term dependencies. This makes LSTM-RNNs ideal for precise speed prediction across diverse driving scenarios.
Methodology
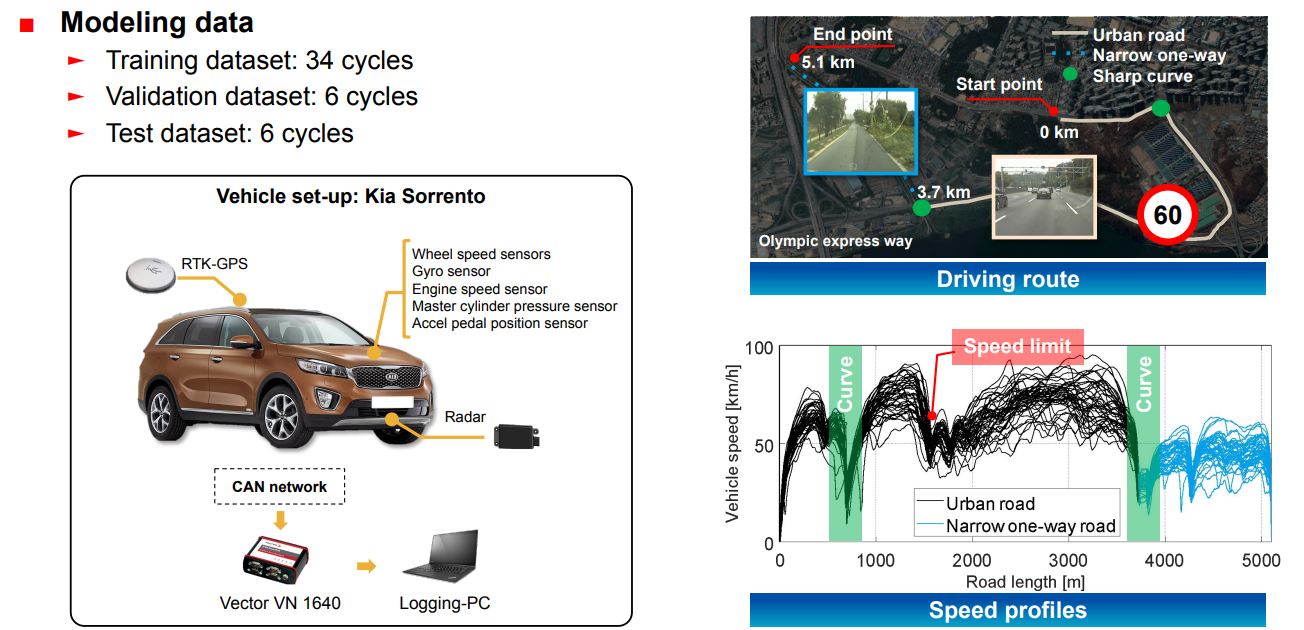
Experiment
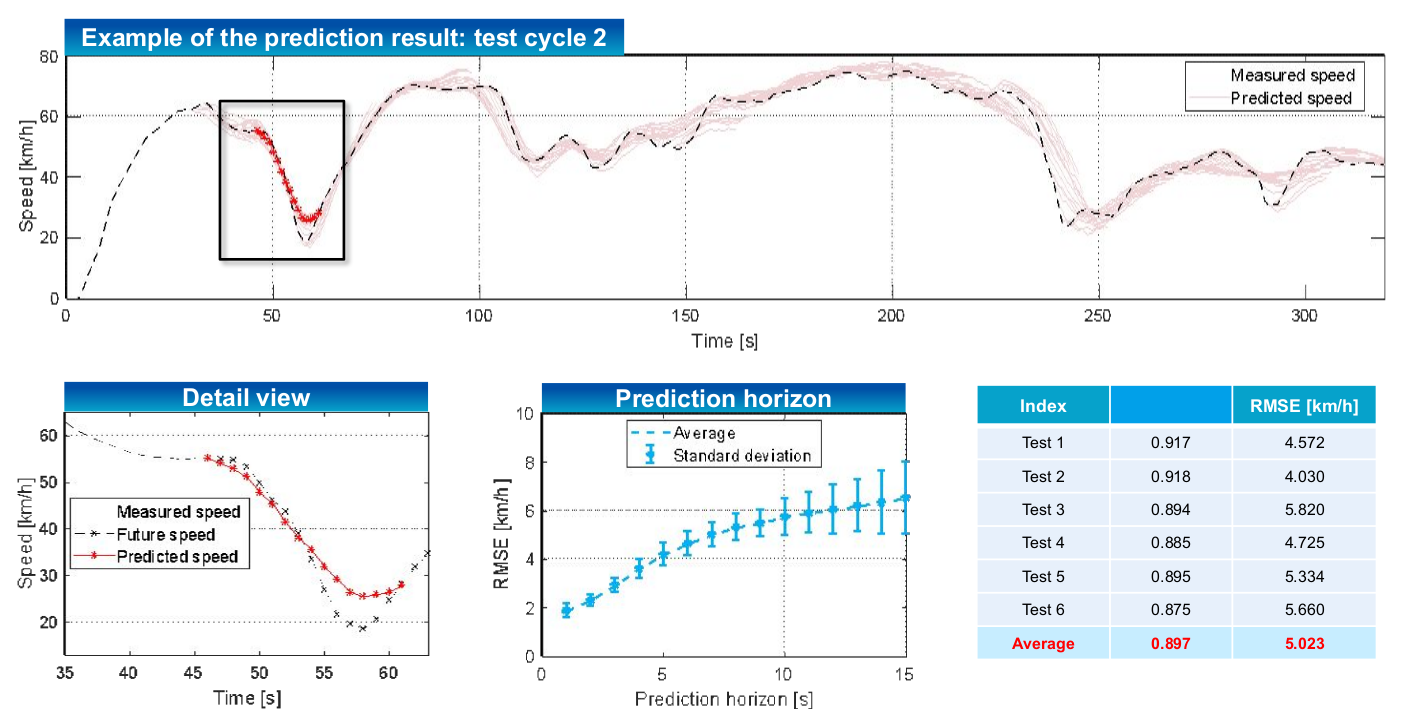
Result
Video